
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� ��������������ؼ�¼33�� . ��ѯʱ��(0.108 ��)
�й���ѧԺ�����Ƚ������о�Ժר��������������������
�й���ѧԺ�Զ����о�������������ȶ���ɹ�������ҡ�ʮ���塱�Ƽ����³ɾ�չ
���������� ˮ�¼�� ȫ��ȫý���Ȩ����ʵʱ����Ʒ���ƽ̨ ��ģ̬ҽ�Ʒ�������������ϵͳ
2022/3/4
���գ����ҡ�ʮ���塱�Ƽ����³ɾ�չ�ڱ���չ���ݿ�Ļ��չ���ԡ�����������չ ����Ƽ�ǿ����Ϊ���⣬�ص�չʾ�ҹ�����ʵʩ����������չս�ԡ����贴��������ȡ�õ��ش�ɹ��� �й���ѧԺ�Զ����о������������㡢ȫ��ȫý���Ȩ����ʵʱ����Ʒ���ƽ̨����ģ̬ҽ�Ʒ�������������ϵͳ�����ܲ����������ϵͳ�ȶ���ɹ��μ���չ����
����������ѧ������������ϵͳ�������ص�ʵ���ҿ��ſ����������
����������ѧ������������ϵͳ�������ص�ʵ���� ���ſ����������
2019/4/22
����������ѧ������������ϵͳ�������ص�ʵ���ҿ��ſ������������
����������ѧ������������ϵͳ�������ص�ʵ����2013���ý���
����������ѧ������������ϵͳ�������ص�ʵ���� 2013�� ��ý���
2019/4/22
����������ѧ������������ϵͳ�������ص�ʵ����2013���ý��
����������ѧ������������ϵͳ�������ص�ʵ����2011���ý���
����������ѧ������������ϵͳ�������ص�ʵ���� 2011�� ��ý���
2019/4/22
����������ѧ������������ϵͳ�������ص�ʵ����2011���ý��

�й���ѧԺ�Զ����о��������������ඨ���˶������о����չ��ͼ��
�й���ѧԺ�Զ����о��� �������� ���� �����˶�����
2018/3/13
���գ��й���ѧԺ�Զ����о�������ϵͳ��������ƹ����ص�ʵ�����о�Ա����־������о��Ŷӣ����һ�ֻ������ߵ������ͻ�ģ�۲����Ļ�ģģ����SMFC�������㷨�������һ����֫��������������Ķ���������⣬����о��ɹ�������IEEE Transaction on Industrial Electronics�ϡ����Ŷ����ȷ�������������Ķ�����ƻ��ƣ�ͨ���ı�˫����֫��ƫת����ʵ������������ϸ�/��DZ����һ...

�й���ѧԺ�Զ����о����������������Ч��������Ƶ������뷽�����������Ȼ��ѧ�����Ƚ���ͼ��
�й���ѧԺ�Զ����о��� �����������Ч��������Ƶ������뷽�� ������Ȼ��ѧ�����Ƚ�
2018/1/10
2018��1��8������,�й����롢����Ժ����������¡�ؾ��й��ҿ�ѧ����������ᡣ�������쵼��ϰ��ƽ�����ǿ���Ÿ�������������ϯ��ᲢΪ�����佱�����ǿ���������롢����Ժ�ڴ���Ͻ������Ÿ������ִ�ᡣ�й���ѧԺ�Զ����о���̷���о�Ա���������о�Ա������־�о�Ա�������о�Ա����˶�о�Ա��ɵ���Ŀ�������������Ч��������Ƶ������뷽�������2017��ȹ�����Ȼ��ѧ�����Ƚ���̷���о�Ա��Ϊ��...
�����������������ѳ�Ϊ�����������һ�����š�����ڴ�ͳ��Ӳ���������������������ܹ�����ı�������״���ֿ���������Ӷ����и��õĻ�����Ӧ�ԡ�������������ĿǰҲ�����Ŷ��������ٶ����������Ѻ����������ܵȼ�����ս�����գ��㽭��ѧ���պ���ѧԺ���㽭ʡ���������������������о��ص�ʵ���������縱���ںͻ�־�����ڿ�����������ˮ������������ȡ����Ҫ��չ��������һ��������������������㣬���ڡ�Science A...
��������ѧԭ�����Ժ���Ϊ���������о���һ�ֺ���ı����˶�β���ƽ�ģ�ͣ�����ԭ��ģ���в����ڹ���ʵ�ֵķ������������������֤��������ģ�͵Ŀ����ԵĻ����ϣ������һ�����ؽ�����β���Ӹ���ͷ���Ļ�е�ṹ�Լ��������̺����ĵ�·ϵͳ����������������ƣ�������������ij����˶������˶���ѧ���������������PID����ʵ��ƽ���˶��ķ�����ͨ��ʵ����֤��������������˶���ƽ���˶��Ŀ����ԣ������������������ζ��ٶ�...
����ģ�����Ƶ���������������㷨
���������� ���ߵ��� ģ������ ����
2016/9/20
�ھ��и������벻ȷ���Ե�ˮ�����£������������ȷ��ˮ��������������ѧģ�����⣬�������ģ �����Ƶ���������������㷨�������ߵ���ԭ����ģ������˼�����ϣ�����ˮ��������·���滮��ͨ��ר�Ҿ��飬 ���һ��ģ����������ʵʱ����ˮ�����������˶�����ͨ������ʵ����֤���㷨����Ч�ԡ����漰ʵ������ �������㷨��ʵʱ���ȶ����ṩˮ�����������˶�·������Ч����ϰ����ȫ�ﵽĿ��㡣
������Ҫ������ɽ����ѧ�������о������з���Һѹ��������������������Ŀ��������ܹ���Ӧ���ӵ��λ���,���и߶�̬���߸���������Һѹ���������������������⣯������������,�����˾��б����ṹ������Һѹ�����������������ȹؽڽṹ,�������������ȶ����ƺ߸�����������Ҫ�������������������˶�ѧ�����˶�ѧģ��,�滮���������ȶ��ĶԽ�С�ܶ���̬��ʵ��Һѹ��������������ƽ̨��ʵ����֤�������������ṹ��Ƶĺ����ԺͲ�...
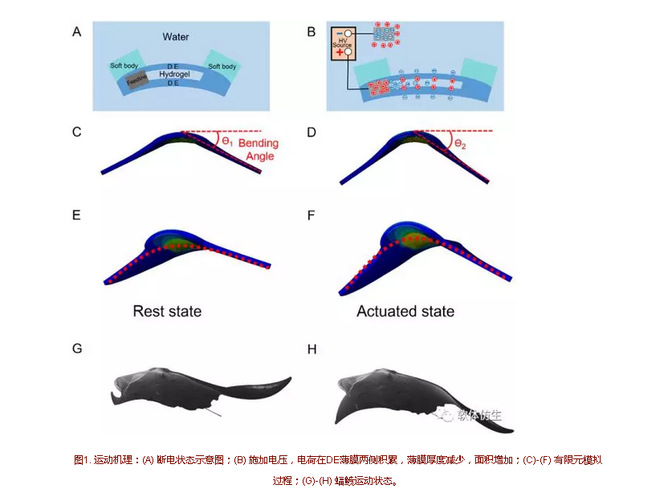
��ˮ�������һ��ɫ�ʰ�쵵�С���ι������㡰˵�������벻Ҫ���ȣ����ܿ����Ǹ����������������й�������Աͨ������һ�ָ߷��Ӳ��ϵ��������գ��з����͵�ѹ������ˮ����������������Ӧ��ǰ��������

���غ����������������������Ʊ�ʯ��ͼ��
���� ����������
2009/11/9
���������ҵ�����վ������Ŀǰ��ȫ������о���Ա�����������κ��ܾ���ˮ���������Ƶ�������������ԭ�����ڣ���Щ��������ڴ���Ȼ������������Ч��ͨ��Ҫ��������������������Ϊ����ͱ��صij�Ա��
���������㸩������ȿ��Ʒ���
���ĵ��� �������� ��ȿ���
2009/9/9
���һ�ֻ������ĸı䷨�����������㸩����̬����ȿ��Ʒ���, ����ʵ��������ˮ�еĸ�DZ�˶�. �÷�������һ�ֿɵ���λ�õ����ؿ�ṹ, �ı������������λ��, ����ʵ�������㸩����̬�ĵ���. �ڶ��������ڲ����ؿ�λ�ú������㸩���ǵĹ�ϵ���з����Ļ�����, ��һ���ٶ��������������븩���ǵĹ�ϵ���н�ģ, �������β���α�����ĸ�����̬�仯�IJ�������. ���и���������ԭ�����������ʵ��, ������֤���ؿ�...
С�����������������ʵʱ·���滮
С�ͻ����� �����˶� ��Դ��
2009/9/7
���һ�ֽṹ����, �˶����, װ��ഫ����, �������ζ���С������������ϵͳ��Ʒ���. �ڷ����Ƽ�����βģʽ�����˶��о��Ļ�����, ������С���������ƽ���ת����˶��Ŀ��Ʒ���. ����˶����ƺʹ�������Ϣ����, �����˻��ں�����������������㷨�ͻ��ڹ��������������������㷨, ��������˻��������ִ�������Ϣ��֪�Ķ�̬��Դ���ٷ���. ͨ��ʵ��, ������������β���ڶ�Ƶ�ʡ����Ⱥ��˶��ٶ�֮��Ĺ�...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...